자이로스코프는 그 구성에 따라서 기준 축에 대한 전체 시스템의 방향 변화 정보를 알려주거나 그 전체 시스템의 각속도를 알려주는 두 가지 기능을 할 수 있다.
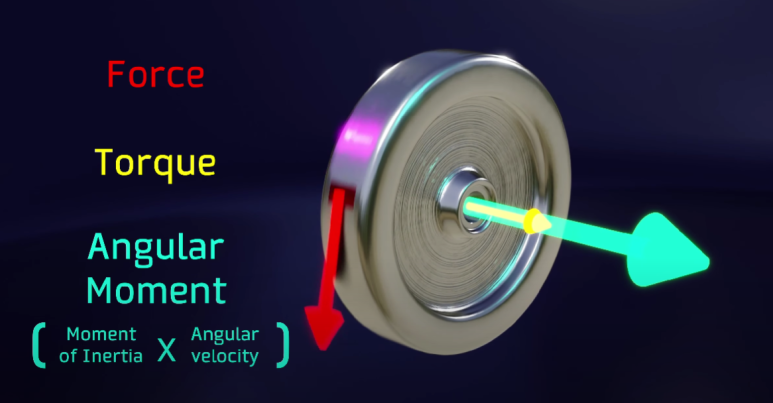
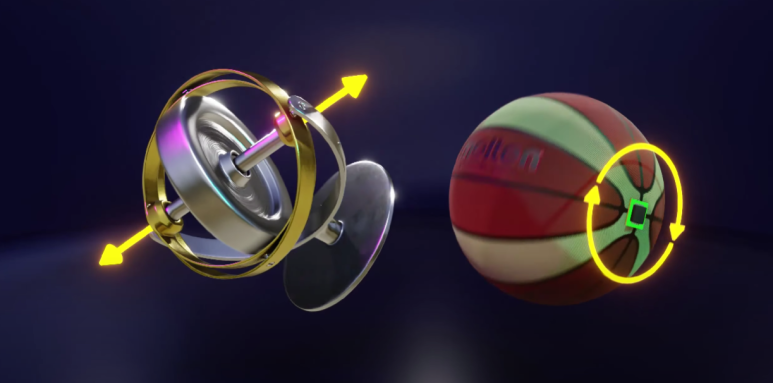
위 사진과 같이 회전 축이 있는 물체에 축에서 떨어진 위치에 힘을 가하면 시스템을 회전하게 만드는 토크가 축과 평행한 방향으로 발생한다.
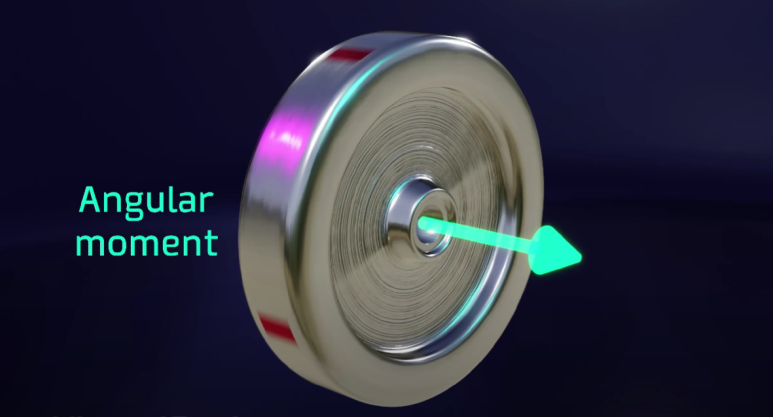
거기에 시스템이 회전하고 있을 때, 회전축과 평행한 방향으로 표현되는 각운동량(angular moment)을 가진다. 각운동량은 관성 모멘트(moment of inertia)와 각속도(angular velocity)에 의해서 결정된다.
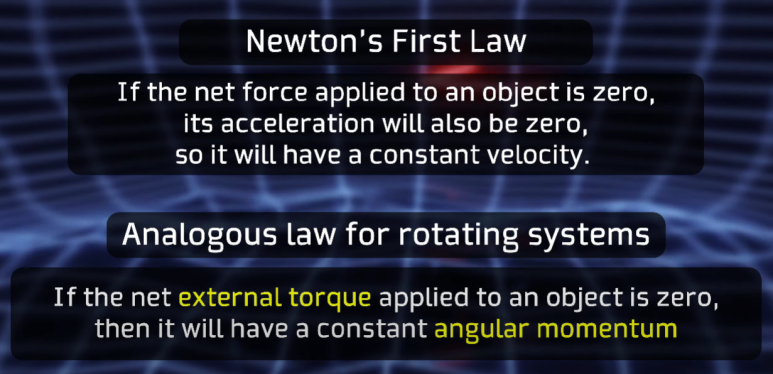
뉴턴 1법칙과 유사하게, 회전 시스템에 작용하는 외부 토크가 없다면 그 시스템은 일정한 각 운동량을 가진다.
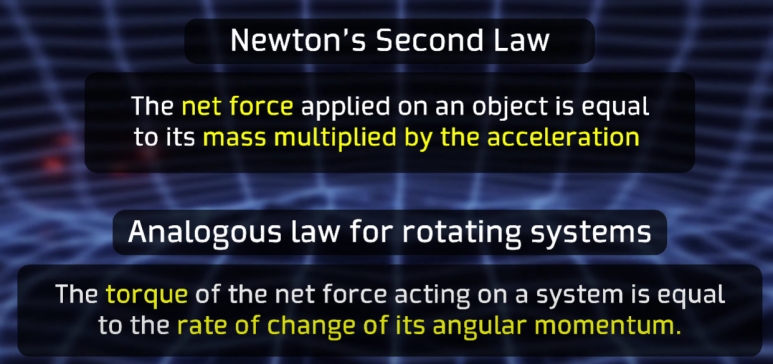
또한, 시스템에 작용하는 토크는 각운동량의 변화량과 같으며, 이는 관성 모멘트와 각가속도(angular acceleration)의 곱과 같다.
만약에 위 사진과 같이 물체를 일정한 각속도로 회전 시키고 토크를 발생시키는 어떠한 힘도 없다면 각 운동량은 보존된다. 따라서 이 물체는 같은 회전 축에 대해서 회전을 지속하고 그 방향을 유지한다.
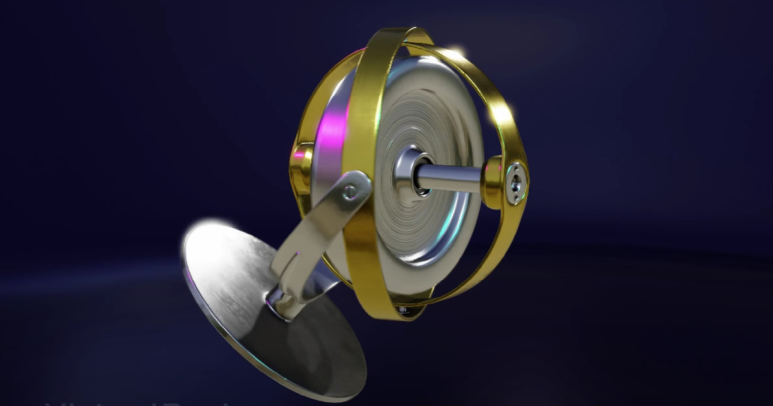
위 사진과 같이 center piece가 회전할 수 있는 상태에서 중앙의 디스크를 빠른 속도로 돌린다면 (큰 각운동량을 가하면) 나머지 시스템의 위치가 바뀌고 회전하더라도 디스크의 회전축의 방향은 바뀌지 않는다.
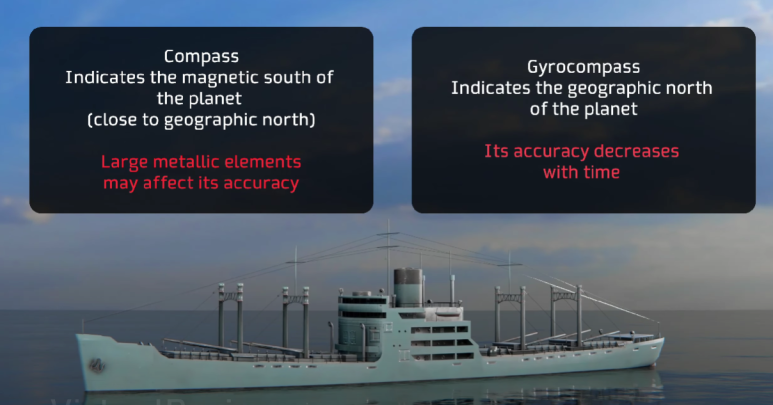
이러한 특성 때문에 gps가 개발되기 이전에 compass를 대체할 이정표로 자이로스코프가 이용되었다.
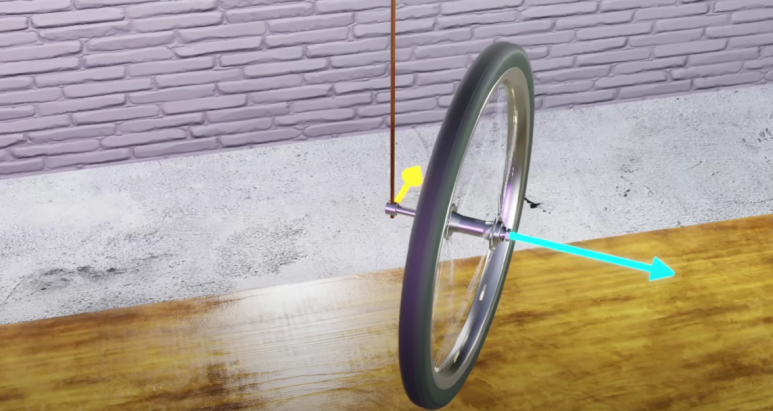
다음으로, 자이로스코프의 다른 기능인 시스템의 각속도 측정은 세차 운동(precession)을 이용한다. 세차 운동은 위 사진과 같이 회전하는 물체가 회전 축을 바꾸도록 힘을 받을 때 돌아가는 회전 운동이다.
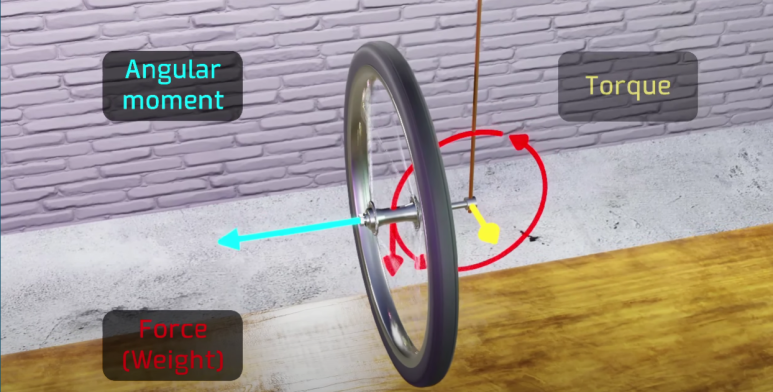
세차 운동이 일어나는 이유를 알아보기 위해서 위 사진과 같은 예시를 보자. 바퀴가 회전하면서 회전 축에 대해서 각 운동량을 갖고 있다. 또한, 바퀴에 작용하는 중력이 지지점에 대해서 떨어져 있기 때문에 이 바퀴를 떨어뜨리는 토크가 발생한다.
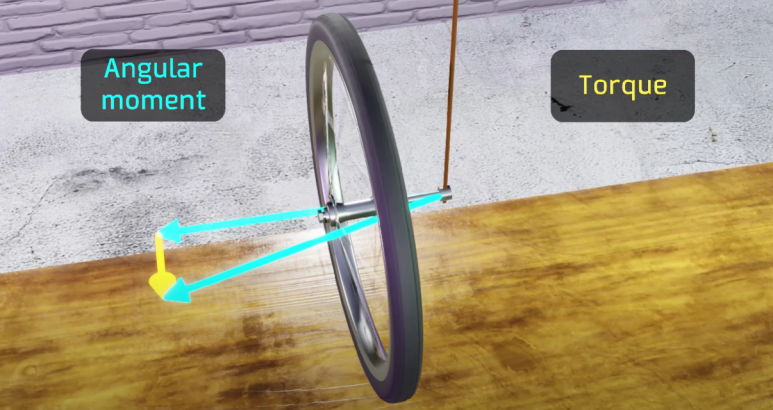
하지만 제 2법칙에 따라서 토크는 각운동량의 변화량과 같다. 여기서 토크는 vertical 성분은 없고 horizontal 한 성분만 있기 때문에 위 사진과 같이 바퀴의 회전축은 중력에 의해서 떨어지지 않고 horizontal하게 바뀌게 된다.
이때 토크는 항상 각운동량의 방향과 수직인 방향으로 작용하므로 바퀴의 회전축은 계속해서 회전하게 된다.
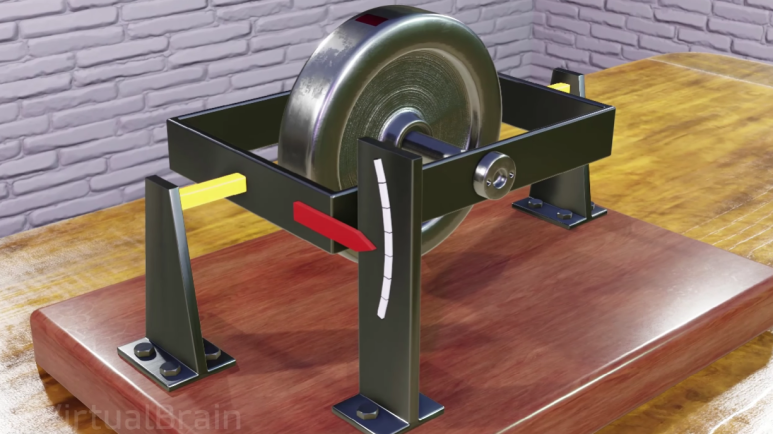
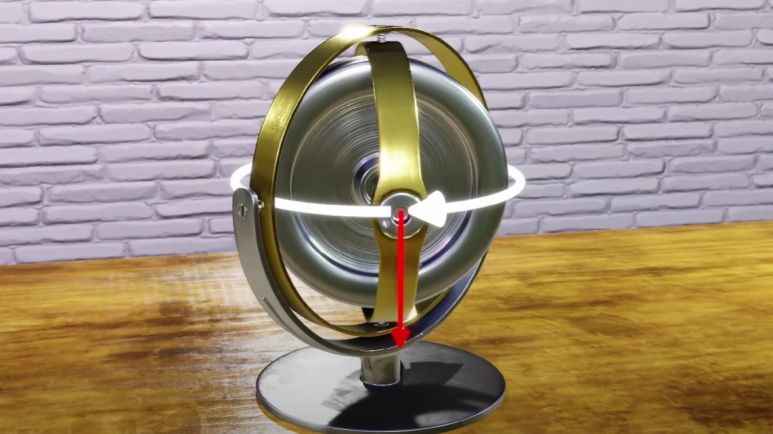
이러한 원리를 사용해서 위 사진과 같이 회전하는 디스크를 중앙에 두고, torsion bar에 의해서 매달려 있는 형태의 시스템을 통해서 시스템의 각속도를 알 수 있다.

Torsion bar는 디스크가 회전할 수 있도록 지지를 해주면서도 토크에 비례하는 저항을 가한다. 따라서 우리는 torsion angle을 이용해서 가해지는 토크를 계산할 수 있다.

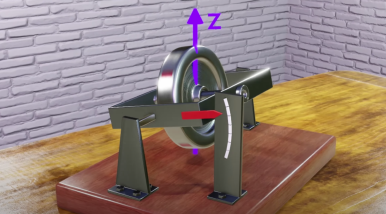
위 사진과 같이 Z-axis에 대해서 전체 시스템을 회전시키면 precession이 torsion bar에 토크를 작용하고 프레임이 회전하게 된다. 이때 torsion bar의 torsion 정도를 통해서 시스템의 각속도를 구해낼 수 있다.
'공부 > 기계 작동 원리' 카테고리의 다른 글
| Door Handle (문 손잡이) (4) | 2025.04.28 |
|---|---|
| Window Blind (블라인드) (0) | 2025.04.28 |
| Cryogenic Engine (극저온 로켓 엔진) (0) | 2025.04.28 |
| Rocket (로켓) (0) | 2025.04.28 |
| Scramjet Engine (스크램제트 엔진) (0) | 2025.04.28 |



