
Four bar linkage는 위 사진처럼 어떤 변을 고정하느냐에 따라서 Crank-Rocker, Double-Crank, Double-Rocker Mechanism을 나타낼 수 있다.

위 사진은 Four bar linkage에서 변의 길이 관계에 따라서 정해지는 motion에 대해서 설명한 것이다. s + l <= p + q를 만족하는 Grashoff's Chain은 어떤 변이 고정되어 있느냐에 따라서 Crank-Rocker, Double-Crank, Double-Rocker Mechanism을 나타낼 수 있고, Non-Grashaff's Chain은 Double-Rocker Mechanism을 나타낸다.

각각의 Mechanism이 적용되는 방법이나 분야는 위와 같다. 각각의 application에 대해서 더욱 자세하게 알아보도록 하자.
I. Crank-Rocker Mechanism
i) Beam Engine

위와 같이 Crank-Rocker Mechanism은 Beam Engine에서 사용되는데, 이는 crank의 회전 motion을 수직 피스톤에서의 왕복 운동으로 바꾸는데 사용된다.
II. Double-Crank Mechanism
i) Coupled Wheels of a Locomotive

위와 같이 Double-Crank Mechanism이 사용되는 첫번째 예시는 Coupling of Locomotive Wheels이다. 이는 마주보는 link의 길이를 같게 만들어서 실현하는데, 한쪽 crank의 rotary motion을 반대쪽 crank의 rotary motion으로 옮길 때 사용된다. 따라서 기차 등에서 주로 사용된다.
ii) Drag Link Quick Return Mechanism

다음으로, Drag-Link Quick Return Mechanism에 사용된다. link 2와 link 4는 다른 속도로 회전하게 되는데, 이를 이용하면 천천히 갔다가 빠르게 되돌아오는 메커니즘을 구현할 수 있다.
III. Double-Rocker Mechanism
i) Watt's Indicator Mechanism
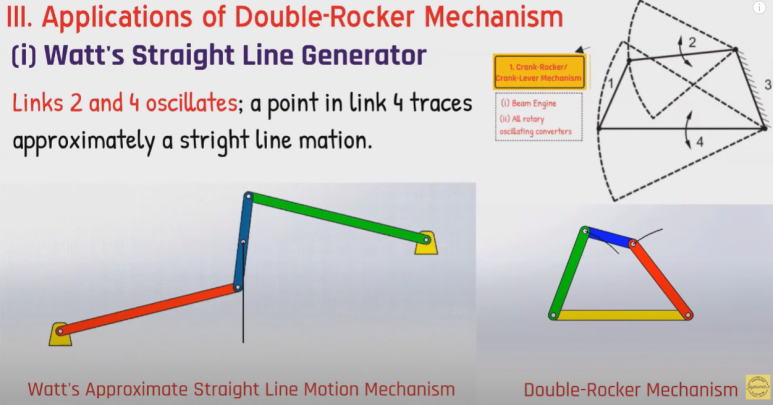
Double-Rocker Mechanism을 사용하는 첫 번째 예시는 Watt's Indicator Mechanism이다. 이는 제임스 와츠가 증기 엔진에서 피스톤을 직선으로 움직이기 위해서 고안한 것이다. 위 사진에서 볼 수 있듯이 link 2 (빨간 link)와 link 4 (초록 link)가 oscillate 하는데, 이에 따라서 파란색 link에 있는 한 지점이 직선을 따라서 위아래로 움직인다.
ii) Pantograph

다음으로는 Pantograph이다. 위 사진에서 볼 수 있듯이, link 2 (초록색 link)와 link 4 (파란색 link)가 oscillate 한다. 이를 이용하면 그려진 path를 확대, 또는 축소를 하여 정확하게 재현할 수 있다.
iii) Ackermann Steering

마지막으로 Double-Rocker Mechanism은 Ackerman Steering에서 사용된다. 위 사진에서 볼 수 있듯이 link 2 (초록색 link / link BC)와 link 4 (빨간색 link / link AD)가 oscillate하는데, 이를 이용하면 좌회전이나 우회전을 하기 위한 steering에서 사용될 수 있다.
'공부 > 기계 작동 원리' 카테고리의 다른 글
| Differential (차동 장치) (0) | 2025.04.26 |
|---|---|
| Gear Types (기어 종류) (0) | 2025.04.26 |
| Four Bar Linkage System (4절 링크) (0) | 2025.04.26 |
| Theory of Vibration (진동학) (0) | 2025.04.26 |
| Gear Design (기어 디자인) (0) | 2025.04.26 |



